Stanford Courses: http://cs149.stanford.edu/fall20/lecture/
CMU Courses: http://www.cs.cmu.edu/~418/
- Manycore & Multicore
multicore每个core都可以处理复杂的逻辑。
manycore相比之下,可以进行更多路的并发。
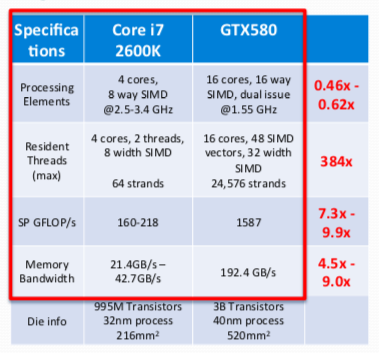
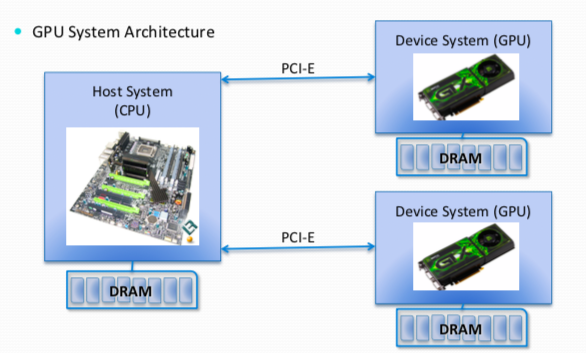
- Why GPU
SIMT. 很多并发,需要进行很多memory的处理 -> roofline model
memory wall -> increase gap between processor & DRAM.

- Maximize memory throughput
- SoA vs AoS: struct of arrawy vs array of struct
- Memory coalescing: combining multi-threads data requirement together to fetch an transaction of data.
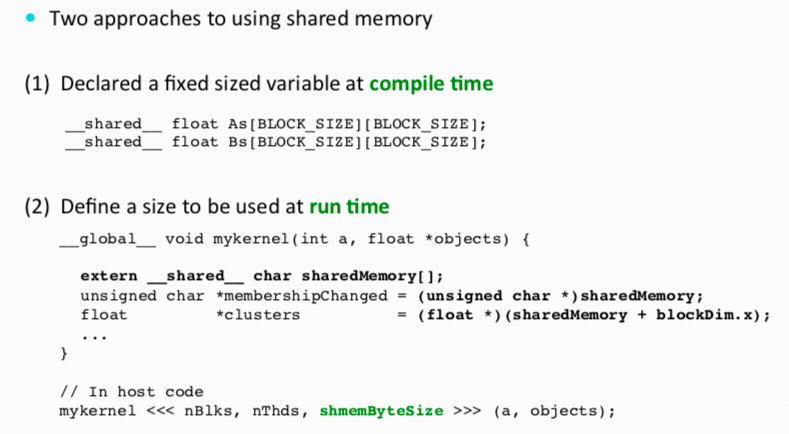
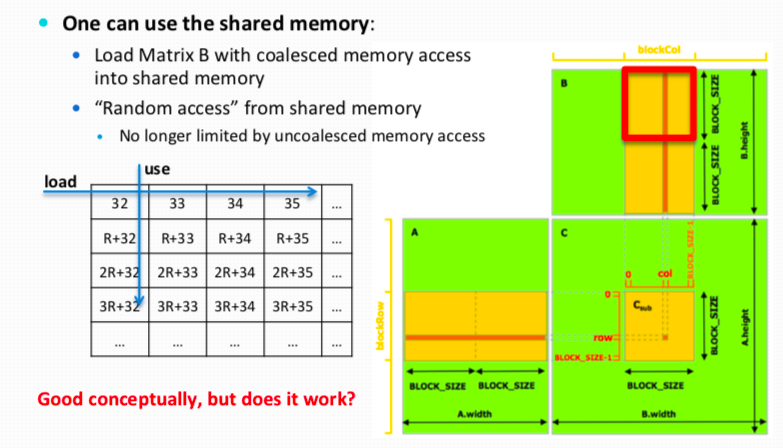
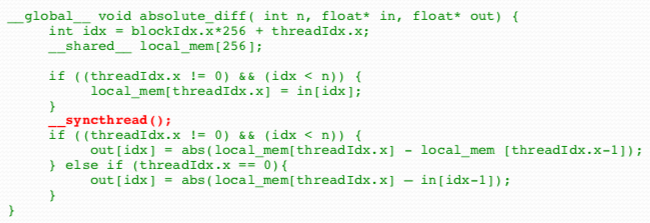
- Use of shared memory: load from DRAM to shared memory; work on shared memory.
- Memory bank conflict: permutation.
- Padding: with cache size.
- Maximize instruction throughput
- Branch divergence
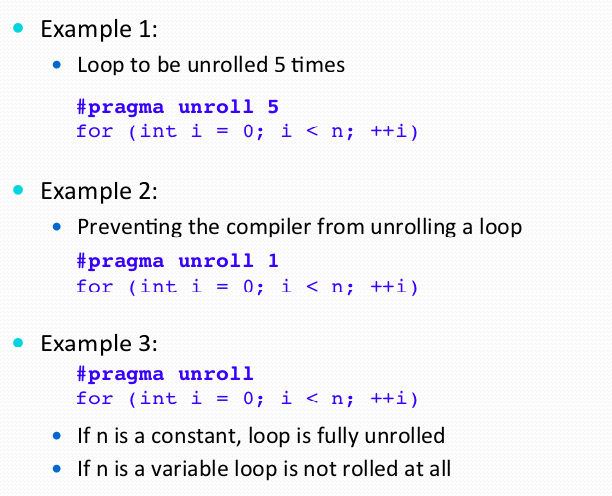
- Optimize instruction mix
-
Maximize scheduling throughput
-
More optimization
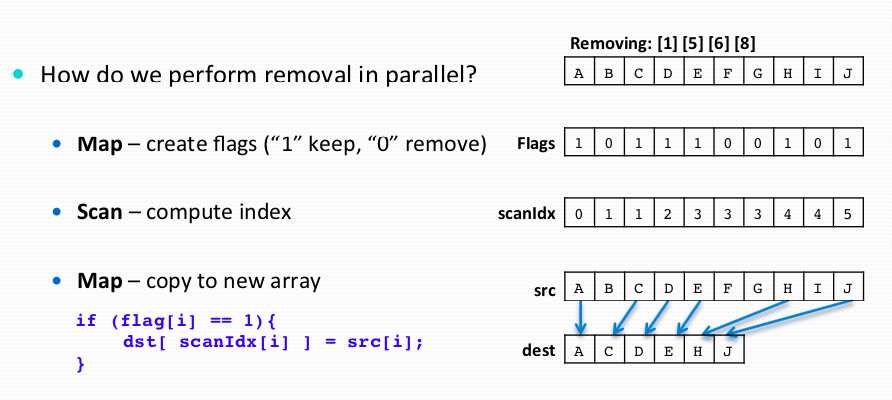
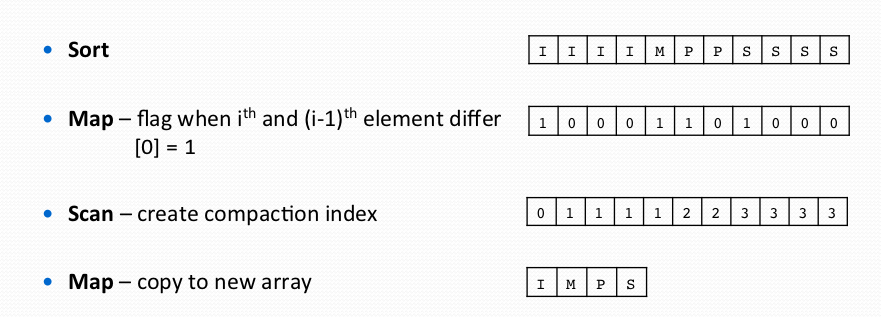
- Map
- Reduce
- Example

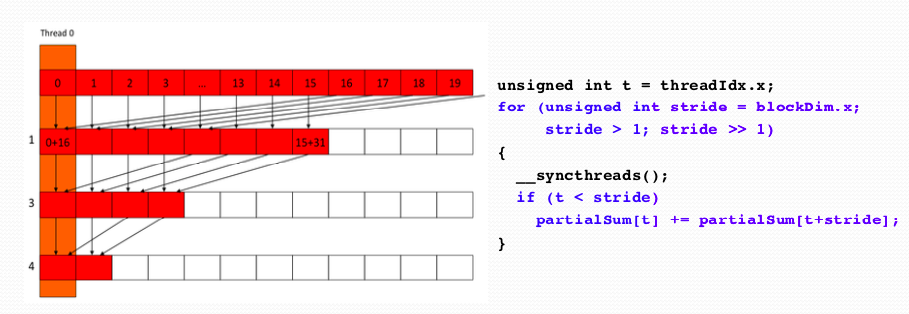
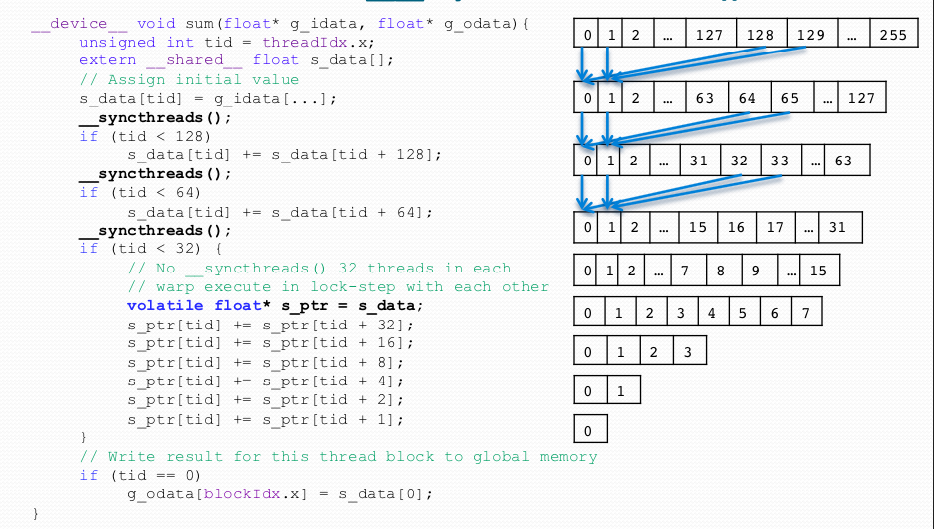
- Array reduce
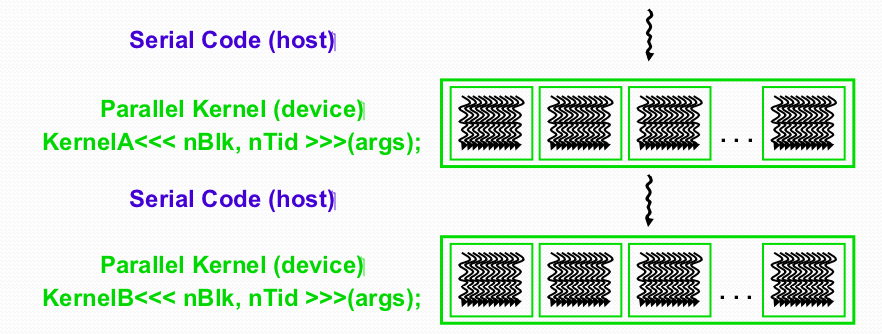
Map reduce of some tasks:
// Vector Cosine of CUDA
__global__ void VCos(int n, float* x, float* y) {
int ix = blockIdx.x * blockDim.x + threadIdx.x;
if (ix < n)
y[ix] = cos(x[ix]);
}
int main() {
float* host_x = (float*)malloc(n * sizeof(float));
float* host_y = (float*)malloc(n * sizeof(float));
float* dev_x;
float* dev_y;
const int n = 1024;
cudaMalloc(&dev_x, n * sizeof(float));
cudaMalloc(&dev_y, n * sizeof(float));
cudaMemcpy(dev_x, host_x, n * sizeof(float), cudaMemcpyHostToDevice);
cudaMemcpy(dev_y, host_y, n * sizeof(float), cudaMemcpyHostToDevice);
const int blk = (n+255)/256;
VCos<<<blk, 256>>>(n, dev_x, dev_y);
cudaMemcpy(host_y, dev_y, n * sizeof(float), cudaMemcpyDeviceToHost);
cudaFree(dev_x);
cudaFree(dev_y);
free(host_x);
free(host_y);
return 0;
}
// Array Reduction
// No shared memory bank conflict
__global__ void VCos(int n, float* x) {
int tid = threadIdx.x;
for (unsigned int s = blockDim.x/2; s > 0; s >>= 1) {
x[tid] += x[tid+s];
}
__synchthreads();
}
static const int arraySize = 10000;
static const int blockSize = 1024;
__global__ void sumCommSingleBlock(const int *a, int *out) {
int idx = threadIdx.x;
int sum = 0;
for (int i = idx; i < arraySize; i += blockSize)
sum += a[i];
__shared__ int r[blockSize];
r[idx] = sum;
__syncthreads();
for (int size = blockSize/2; size>0; size/=2) { //uniform
if (idx<size)
r[idx] += r[idx+size];
__syncthreads();
}
if (idx == 0)
*out = r[0];
}
sumCommSingleBlock<<<1, blockSize>>>(dev_a, dev_out);
// Ref: https://sodocumentation.net/cuda/topic/6566/parallel-reduction--e-g--how-to-sum-an-array-
// https://developer.download.nvidia.com/assets/cuda/files/reduction.pdf
// CUDA: max pooling; convolution; average pooling.
// Convolution: FFT; with matrix multiply.
// High Performance Convolutional Neural Networks forDocument Processing
// make the feature map, each windon data as line W * W * M, and the output kernel with matrix: W * W * M * N
// Matrix multiply
#define BLOCK_SIZE 25
#include <stdio.h>
#include <cuda.h>
#include <cuda_runtime.h>
#include "matrix_mul.h"
#define TILE_WIDTH 2
namespace cuda
{
__device__ float* get_sub_matrix(float *sq_matrix, int sq_dimension, int row, int col){
float *sub_matrix;
sub_matrix = &sq_matrix[sq_dimension*row*BLOCK_SIZE + BLOCK_SIZE*col];
return sub_matrix;
}
void padding_reverse(float *sq_matrix, float *new_matrix, unsigned int sq_dimension, unsigned int new_dimension) {
for(int i=0; i<sq_dimension; i++) {
for(int j=0; j<sq_dimension; j++) {
sq_matrix[i*sq_dimension + j] = new_matrix[i*new_dimension + j];
}
}
}
void padding(float *sq_matrix, float *new_matrix, unsigned int sq_dimension, unsigned int new_dimension) {
for(int i=0; i<new_dimension; i++) {
for(int j=0; j<new_dimension; j++) {
if(i<sq_dimension && j<sq_dimension) {
new_matrix[i*new_dimension + j] = sq_matrix[i*sq_dimension + j];
}
else {
new_matrix[i*new_dimension + j] = 0;
}
}
}
}
__global__
void
small_matrix_mul_kernel(float *sq_matrix_1, float *sq_matrix_2, float *sq_matrix_result, int sq_dimension)
{
int row = blockIdx.y*blockDim.y+threadIdx.y;
int col = blockIdx.x*blockDim.x+threadIdx.x;
float sum = 0.0f;
for(int k = 0; k < sq_dimension; k++)
{
sum += sq_matrix_1[row*sq_dimension + k] * sq_matrix_2[k*sq_dimension + col];
}
sq_matrix_result[row*sq_dimension + col] = sum;
}
__global__
void
matrix_mul_kernel(float *sq_matrix_1, float *sq_matrix_2, float *sq_matrix_result, int sq_dimension)
{
int b_col = blockIdx.x;
int b_row = blockIdx.y;
int t_col = threadIdx.x;
int t_row = threadIdx.y;
float *sub_matrix = get_sub_matrix(sq_matrix_result, sq_dimension, b_row, b_col);
float sum = 0.0f;
for(int i = 0; i < sq_dimension/BLOCK_SIZE; i++)
{
float *sub_1 = get_sub_matrix(sq_matrix_1, sq_dimension, b_row, i);
float *sub_2 = get_sub_matrix(sq_matrix_2, sq_dimension, i, b_col);
__shared__ float A[BLOCK_SIZE][BLOCK_SIZE];
__shared__ float B[BLOCK_SIZE][BLOCK_SIZE];
A[t_row][t_col] = sub_1[t_row*sq_dimension+t_col];
B[t_row][t_col] = sub_2[t_row*sq_dimension+t_col];
__syncthreads();
for (int j = 0; j < BLOCK_SIZE ; ++j){
sum += A[t_row][j] * B[j][t_col];
}
__syncthreads();
}
sub_matrix[t_row*sq_dimension + t_col] = sum;
}
void
matrix_multiplication(float *sq_matrix_1, float *sq_matrix_2, float *sq_matrix_result, unsigned int sq_dimension)
{
/* padded dimension*/
unsigned int new_dimension = (sq_dimension%BLOCK_SIZE == 0? sq_dimension:(sq_dimension/BLOCK_SIZE+1)*BLOCK_SIZE);
unsigned int size = new_dimension * new_dimension * sizeof(float);
float *sq_matrix_1_d, *sq_matrix_2_d, *sq_matrix_result_d;
/***************************************************
0st Part: padding, if necessary
****************************************************/
float *padded_matrix_1, *padded_matrix_2, *padded_matrix_result;
if(sq_dimension ^ new_dimension){
padded_matrix_1 = (float *)malloc(size);
padded_matrix_2 = (float *)malloc(size);
padded_matrix_result = (float *)malloc(size);
padding(sq_matrix_1, padded_matrix_1, sq_dimension, new_dimension);
padding(sq_matrix_2, padded_matrix_2, sq_dimension, new_dimension);
}else{
padded_matrix_1 = sq_matrix_1;
padded_matrix_2 = sq_matrix_2;
padded_matrix_result = sq_matrix_result;
}
/***************************************************
1st Part: Allocation of memory on device memory
****************************************************/
/* copy sq_matrix_1 and sq_matrix_2 to device memory */
cudaMalloc((void**) &sq_matrix_1_d, size);
cudaMemcpy(sq_matrix_1_d, padded_matrix_1, size, cudaMemcpyHostToDevice);
cudaMalloc((void**) &sq_matrix_2_d, size);
cudaMemcpy(sq_matrix_2_d, padded_matrix_2, size, cudaMemcpyHostToDevice);
/*allocate sq_matrix_result on host */
cudaMalloc((void**) &sq_matrix_result_d, size);
/***************************************************
2nd Part: Inovke kernel
****************************************************/
dim3 dimBlock(BLOCK_SIZE, BLOCK_SIZE);
dim3 dimGrid(new_dimension / dimBlock.x, new_dimension / dimBlock.y);
if(sq_dimension > BLOCK_SIZE){
matrix_mul_kernel<<<dimGrid, dimBlock, dimBlock.x * dimBlock.x * sizeof(float)>>>(sq_matrix_1_d, sq_matrix_2_d, sq_matrix_result_d, new_dimension);
}
else{
small_matrix_mul_kernel<<<dimGrid, dimBlock, dimBlock.x * dimBlock.x * sizeof(float)>>>(sq_matrix_1_d, sq_matrix_2_d, sq_matrix_result_d, new_dimension);
}
/***************************************************
3rd Part: Transfer result from device to host
****************************************************/
cudaMemcpy(padded_matrix_result, sq_matrix_result_d, size, cudaMemcpyDeviceToHost);
/***************************************************
4th Part: free the padded matrices, if padding is necessary
****************************************************/
if(sq_dimension ^ new_dimension){
padding_reverse(sq_matrix_result, padded_matrix_result, sq_dimension, new_dimension);
free(padded_matrix_1);
free(padded_matrix_2);
free(padded_matrix_result);
}
cudaFree(sq_matrix_1_d);
cudaFree(sq_matrix_2_d);
cudaFree(sq_matrix_result_d);
}
} // namespace cuda